Implement high level classes for fine-to-coarse. More...
#include <rslf_fine_to_coarse_core.hpp>
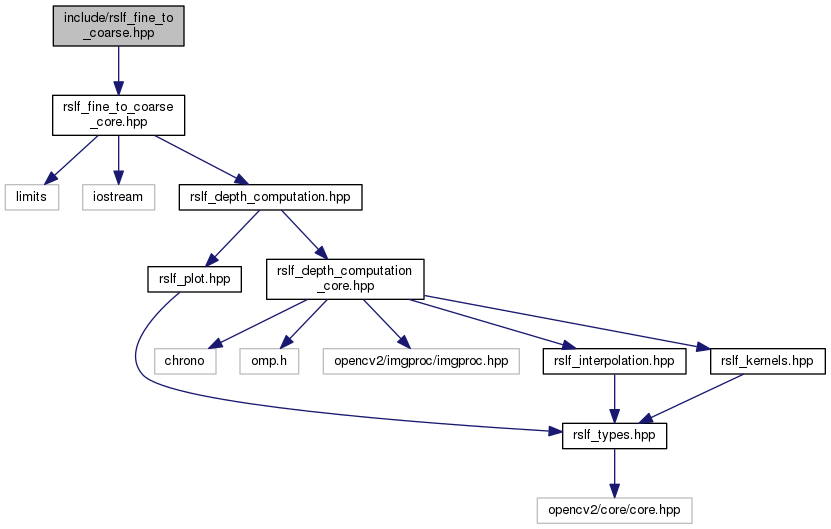
Include dependency graph for rslf_fine_to_coarse.hpp:
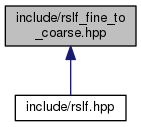
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | rslf::FineToCoarse< DataType > |
Macros | |
| #define | _MIN_SPATIAL_DIM 10 |
Typedefs | |
| using | rslf::FineToCoarse_1ch = FineToCoarse< float > |
| Specialization of FineToCoarse for 1-channel matrices. | |
| using | rslf::FineToCoarse_3ch = FineToCoarse< cv::Vec3f > |
| Specialization of FineToCoarse for 3-channel matrices. | |
Detailed Description
Implement high level classes for fine-to-coarse.
