Implement low-level fine-to-coarse functions. More...
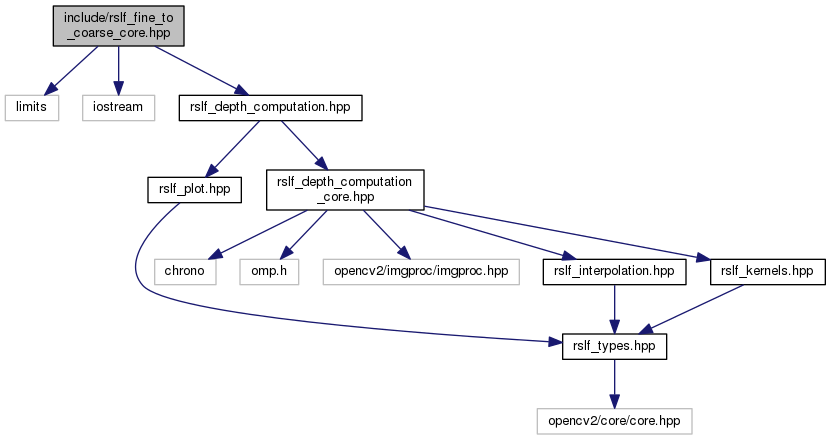
Include dependency graph for rslf_fine_to_coarse_core.hpp:
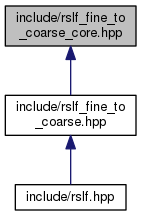
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| void | rslf::downsample_EPIs (const Vec< Mat > &in_epis, Vec< Mat > &out_epis) |
| Downsample given EPIs by a factor 2 in the spatial dimensions. More... | |
| void | rslf::fuse_disp_maps (const Vec< Vec< Mat >> &in_disp_pyr_p_s_v_u, const Vec< Vec< Mat > > &in_validity_indicators_p_s_v_u, Vec< Mat > &out_map_s_v_u, Vec< Mat > &out_validity_s_v_u) |
| Fuse a pyramid of depths into one depth map and apply a median filter on top of it. More... | |
Detailed Description
Implement low-level fine-to-coarse functions.
Function Documentation
◆ downsample_EPIs()
Downsample given EPIs by a factor 2 in the spatial dimensions.
- Parameters
-
in_epis Input EPIs out_epis Output EPIs
◆ fuse_disp_maps()
| void rslf::fuse_disp_maps | ( | const Vec< Vec< Mat >> & | in_disp_pyr_p_s_v_u, |
| const Vec< Vec< Mat > > & | in_validity_indicators_p_s_v_u, | ||
| Vec< Mat > & | out_map_s_v_u, | ||
| Vec< Mat > & | out_validity_s_v_u | ||
| ) |
Fuse a pyramid of depths into one depth map and apply a median filter on top of it.
- Parameters
-
in_disp_pyr_p_s_v_u A pyramid of disparity maps (finest first) in_validity_indicators_p_s_v_u A pyramid of validity indicators for the respective disparity maps out_map_s_v_u The output fused map out_validity_s_v_u The output disp validity mask
